Surface Material and Roughness Sensing via Ambient Vibrometry
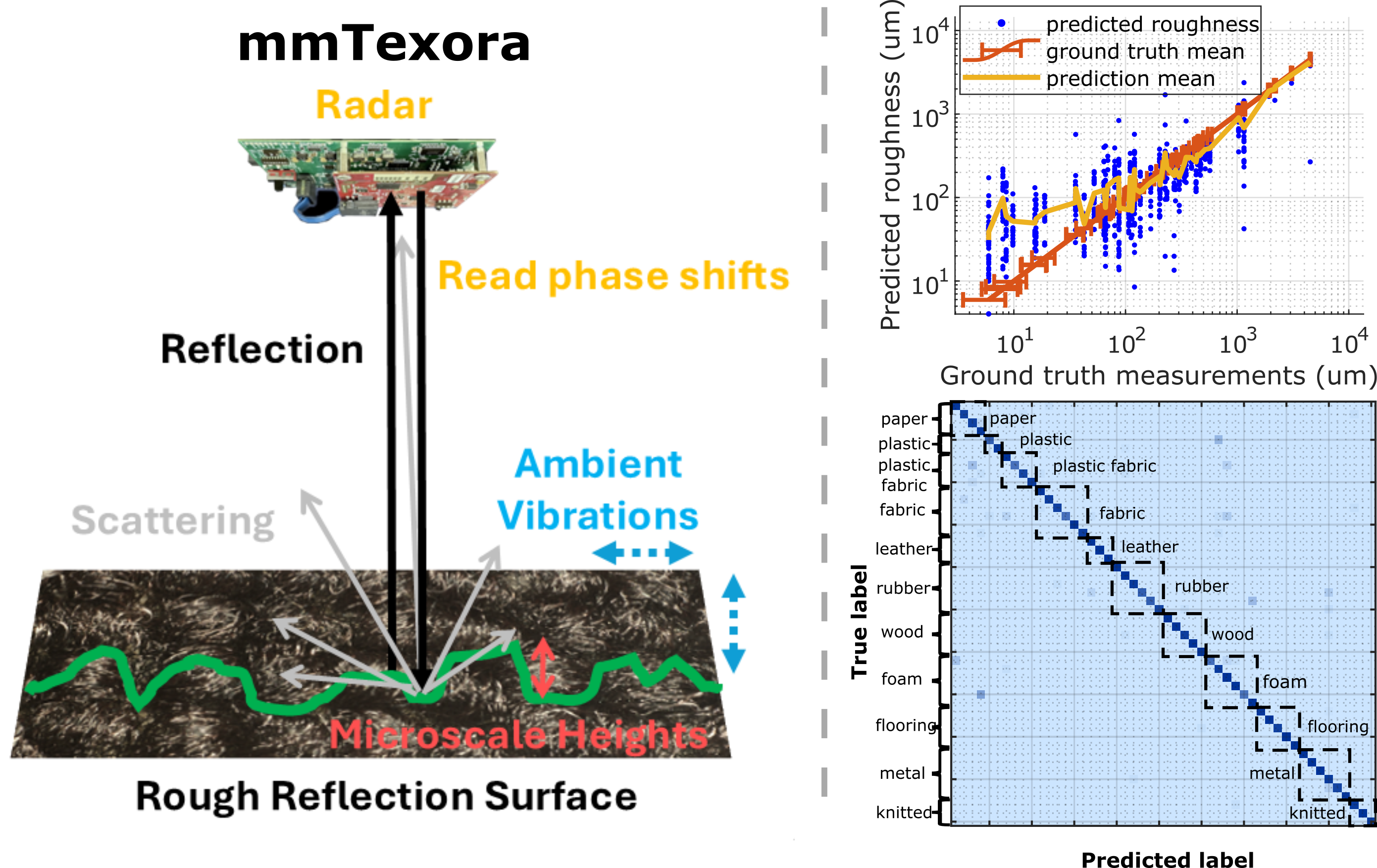
This project explores to sense the roughness of surfaces, even if obstructed from field-of-view. We pose this question in the context of robotic grasping and manipulation to explore if robots can learn the texture of objects prior to grasping them. Importantly, we seek to do so in a completely contact-free fashion (ruling out tactile sensors), despite obstructions (ruling out cameras and lidar). We present mmTexora, a novel roughness sensing system using mmWave radar, leveraging ambient vibrations that produce temporal phase variations to objects in everyday environments. We demonstrate how these phase variations convey valuable information about the structure of bumps and ridges on a surface, thereby revealing details about surface roughness.