Page Not Found
Page not found. Your pixels are in another canvas.

A list of all the posts and pages found on the site. For you robots out there is an XML version available for digesting as well.
Page not found. Your pixels are in another canvas.
About me
This is a page not in th emain menu
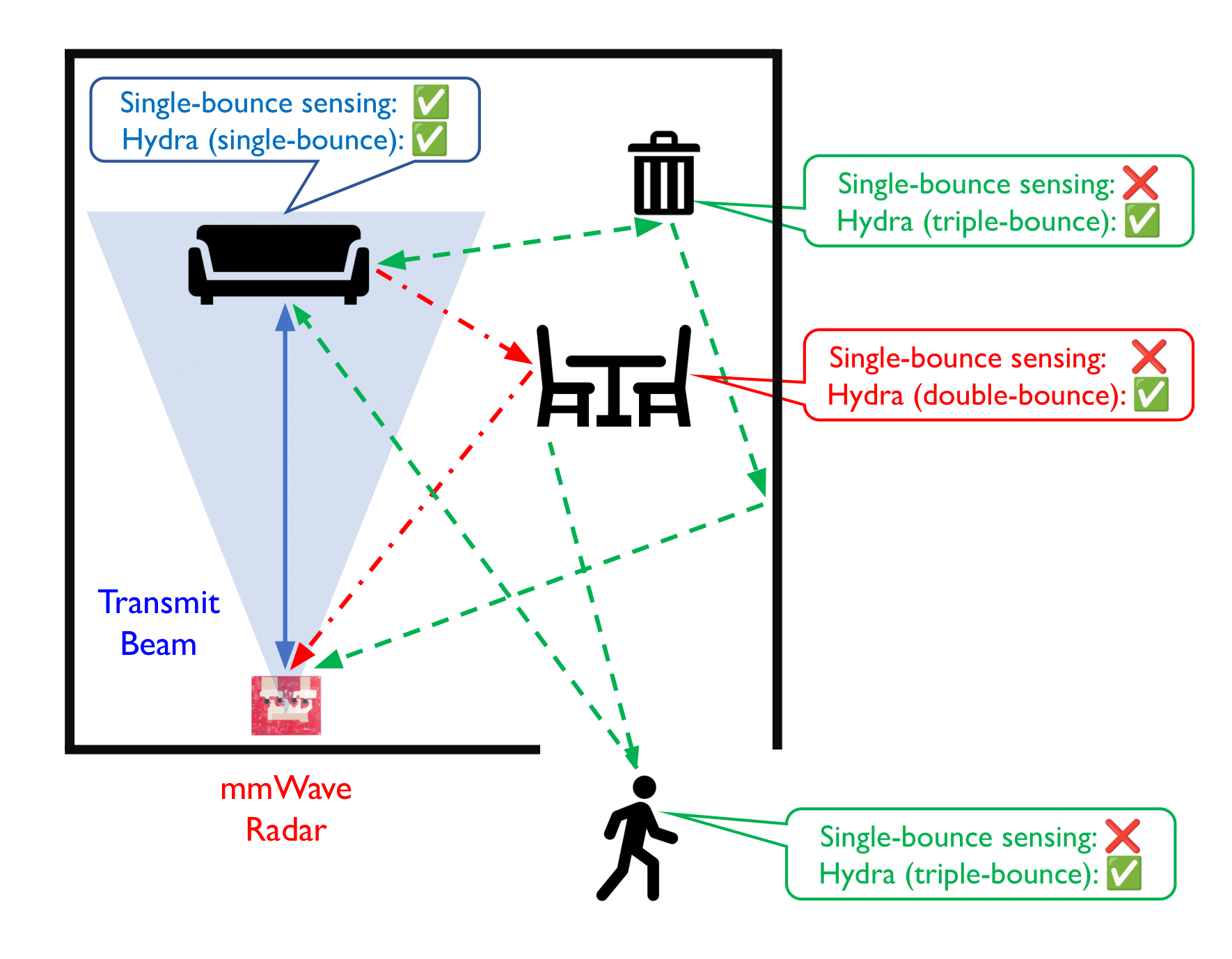
This project aim to solve the problem: “Can millimeter-wave (mmWave) radars sense objects not directly illuminated by the radar - for instance, objects located outside the transmit beamwidth, behind occlusions, or placed fully behind the radar?” Traditionally, mmWave radars are limited to sense objects that are directly illuminated by the radar and scatter its signals directly back. In practice, however, radar signals scatter to other intermediate objects in the environment and undergo multiple bounces before being received back at the radar. We present Hydra, a framework to explicitly model and exploit multi-bounce paths for sensing, to sense beyond-field-of-view objects without prior knowledge of the environment.
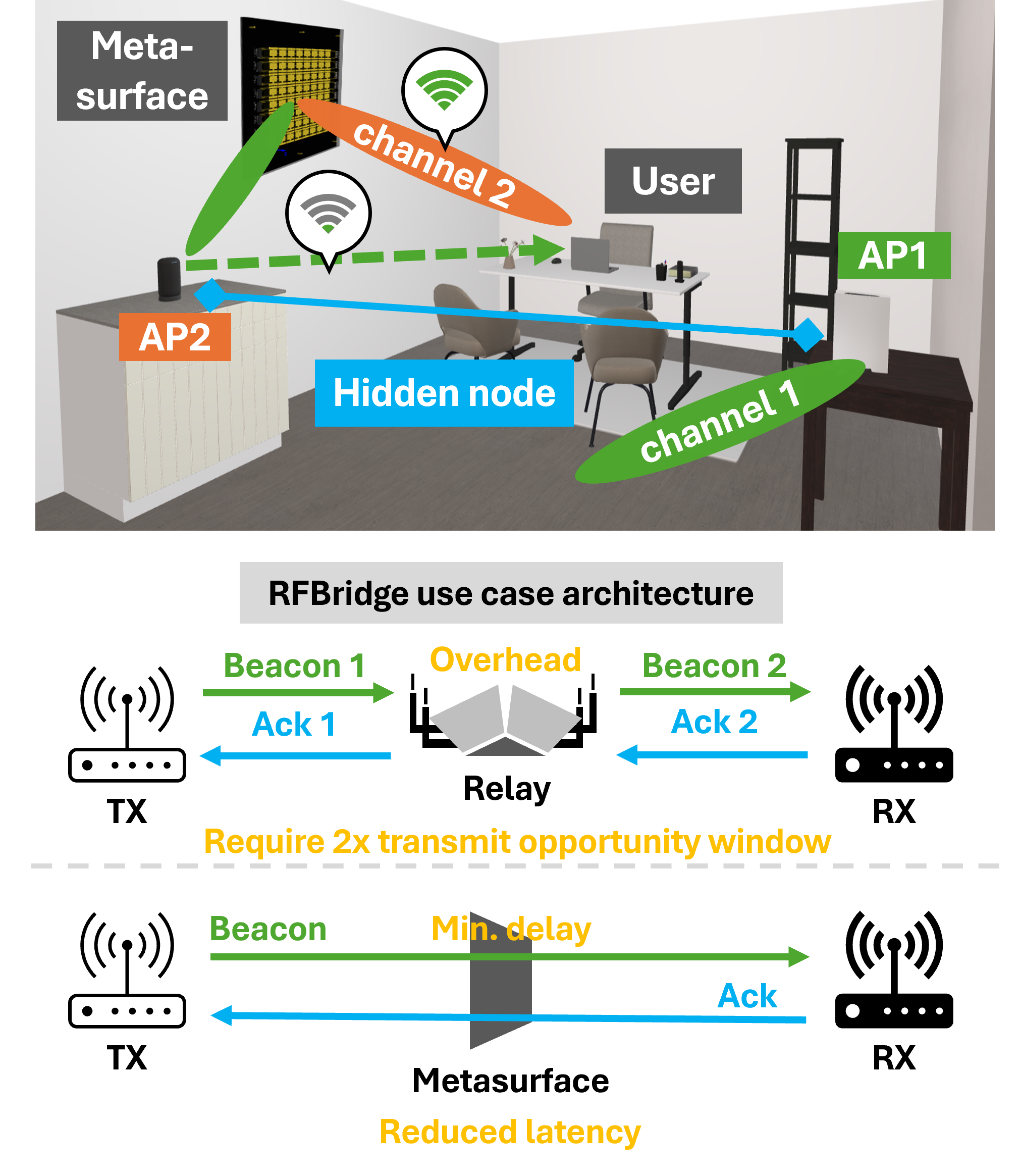
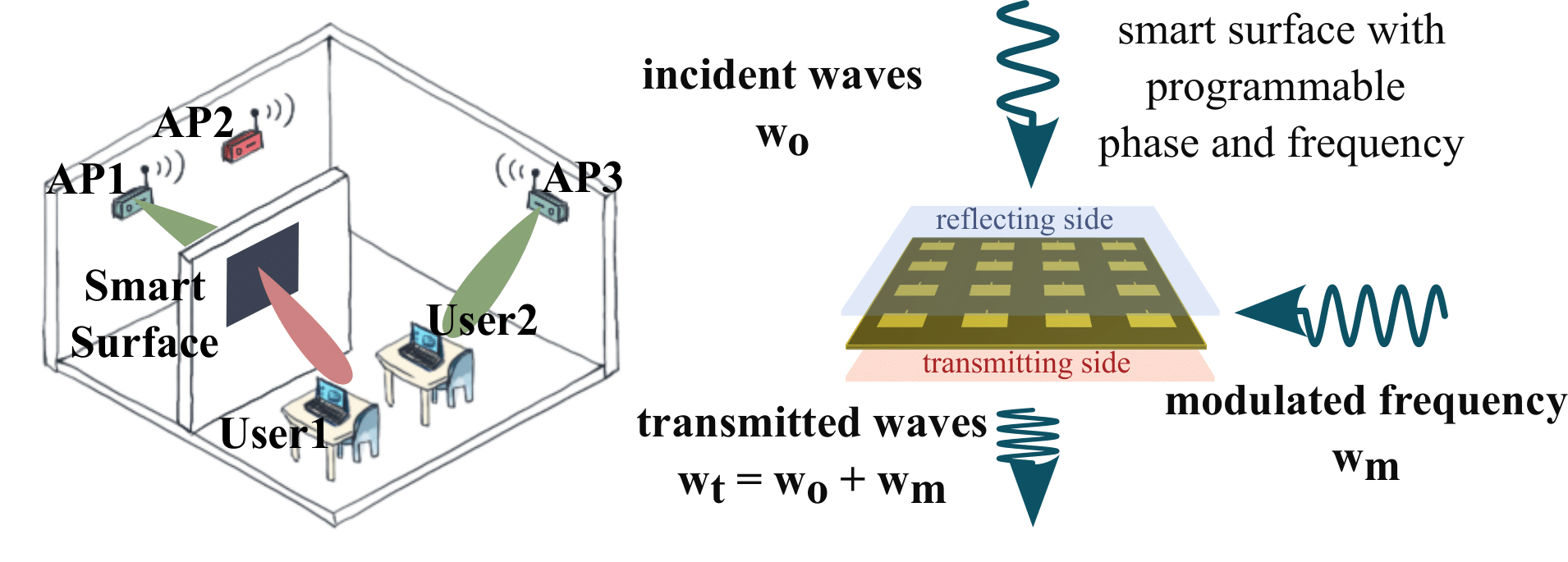
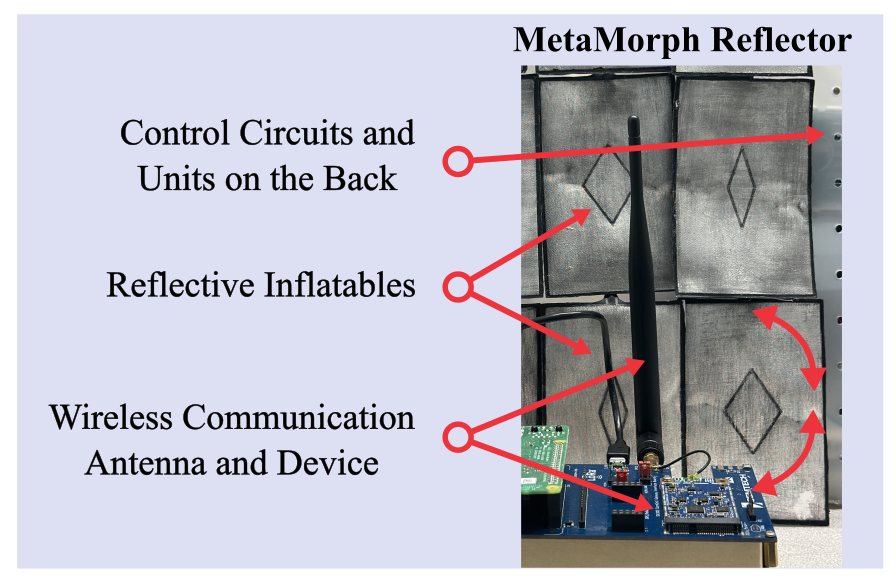
A simple soda can can act as a directional reflector to improve wireless signal strength by focusing energy toward one direction. But what if such reflective surfaces were shape-programmable and able to adapt to environmental changes? We introduce MetaMorph, a shape-programmable reflective waveguide built using inflatable robotic structures to enhance wireless reception. By dynamically adjusting its geometry, MetaMorph adapts to multipath variations and changes in transmitter location. This adaptability helps maintain reliable links in situations where temporary obstructions—such as construction—would otherwise degrade signal quality and force small IoT devices to waste energy on retransmissions.
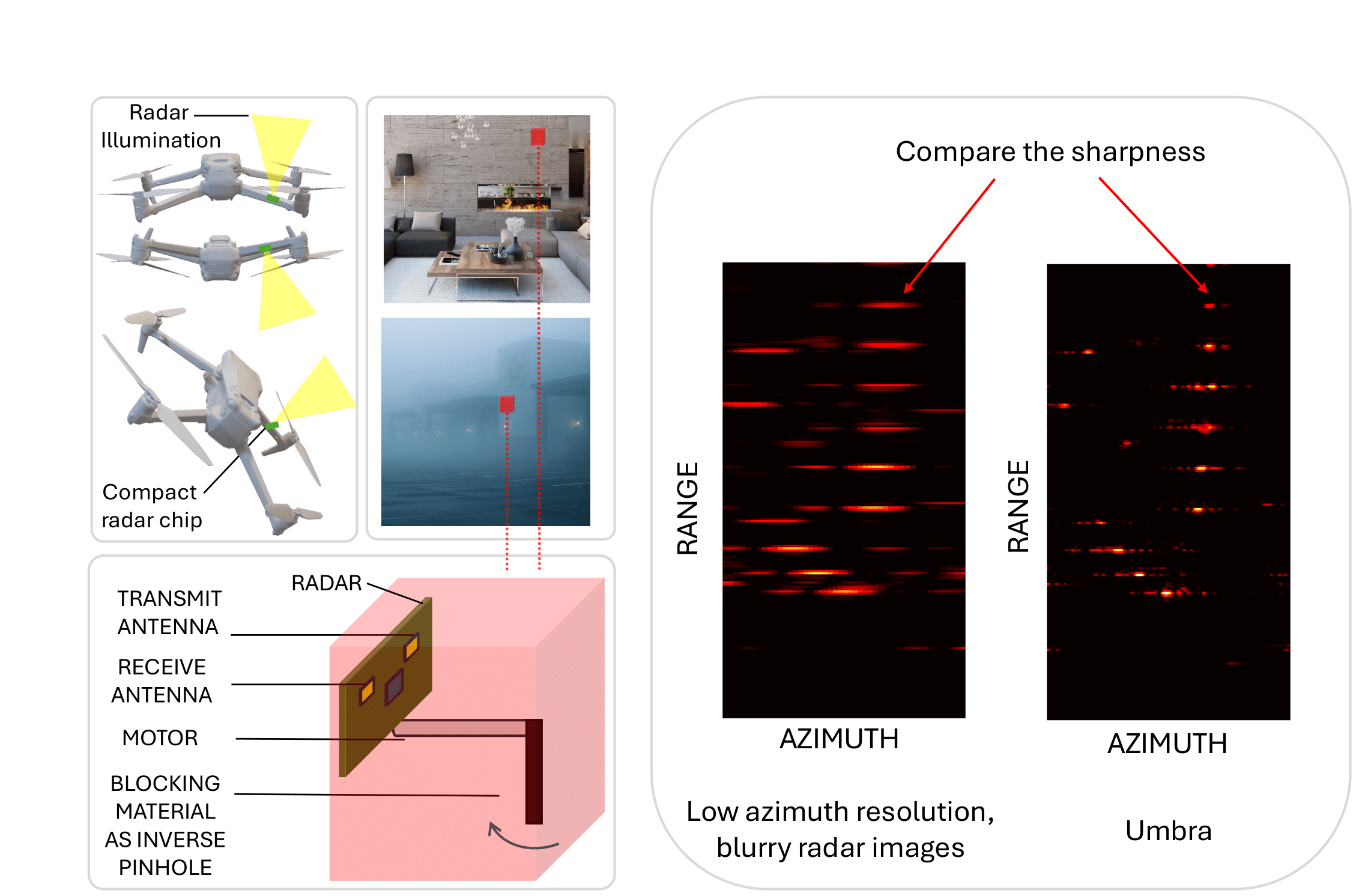
Millimeter wave radars are popular for perception in vision-denied contexts due to their compact size. This paper explores emerging use-cases that involve static mount or momentarily-static compact radars to image obejcts leveraging inverse pinholes. Pinhole camera works on the principle that light wave travels in straight line passing through the small aperture. Here, we ask the question of “Can we take advantge of dynamic pinhold placed in front of a radar to enhance its imaging aperture?” This paper presents Umbra, a mmWave high resolution imaging system, that introduces the concept of rotating “inverse pinholes” for angular resolution enhancement.
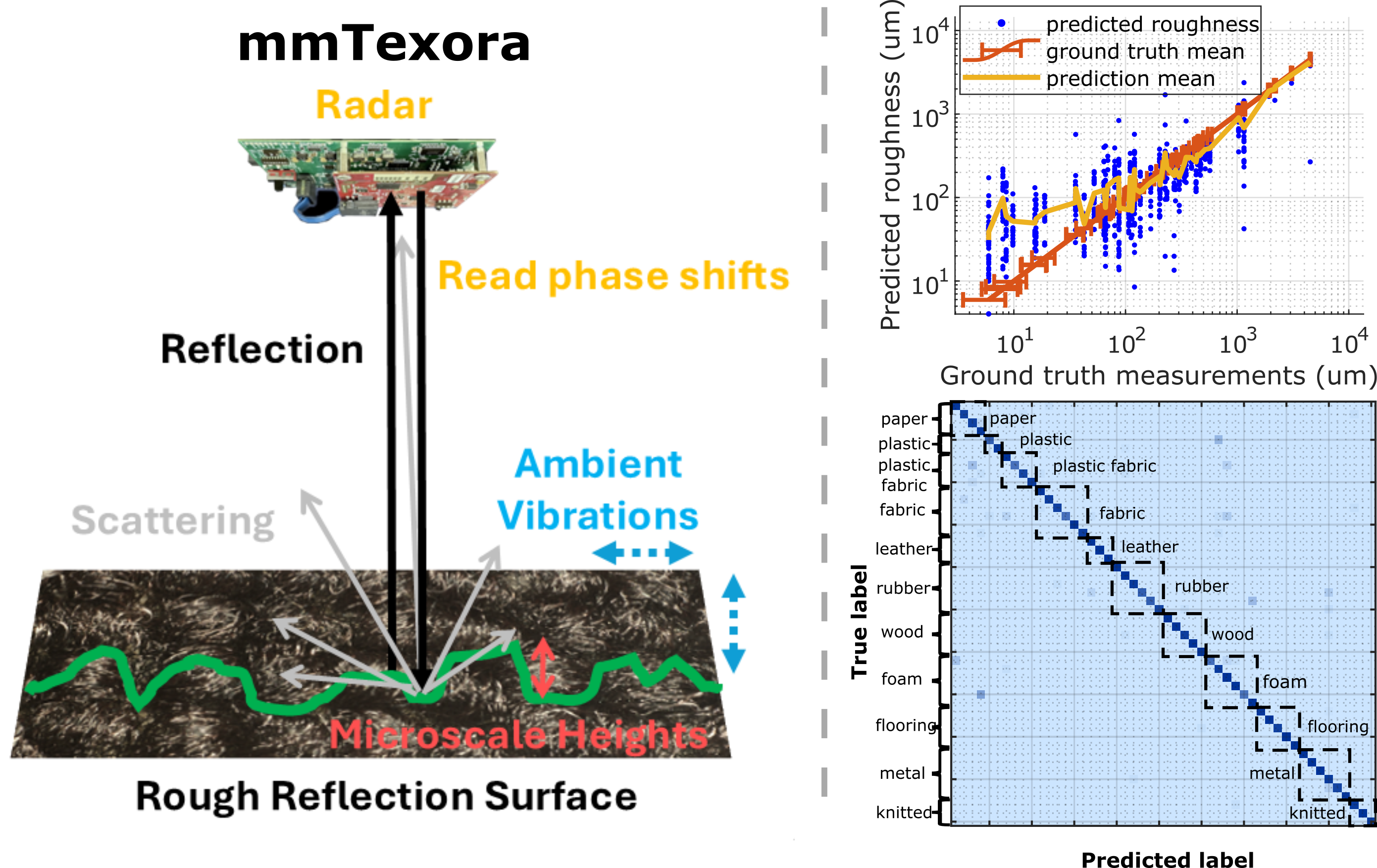
This project explores to sense the roughness of surfaces, even if obstructed from field-of-view. We pose this question in the context of robotic grasping and manipulation to explore if robots can learn the texture of objects prior to grasping them. Importantly, we seek to do so in a completely contact-free fashion (ruling out tactile sensors), despite obstructions (ruling out cameras and lidar). We present mmTexora, a novel roughness sensing system using mmWave radar, leveraging ambient vibrations that produce temporal phase variations to objects in everyday environments. We demonstrate how these phase variations convey valuable information about the structure of bumps and ridges on a surface, thereby revealing details about surface roughness.